Es macht immer Spaß, mit einem selbst balancierenden zweirädrigen Roboter zu spielen, aber dieser wird via Wi-Fi gesteuert und übertragt einen Live-Videostream von seinem ESP32-Kameramodul!
Hier ist ein großartiges Projekt von aadhuniklabs drüben bei hackster.io, das die Verwendung von Proportional-Integral-Derivative demonstriert (PID) und fährt dann fort, um anzugeben, mit einer Wi-Fi-Fernbedienung und einem ESP32-Kameramodul.
Die PID-Regelung ist für viele Bereiche von zentraler Bedeutung, insbesondere in der Industrie und Robotik: Damit wir jede Art von autonomer Aktivität ausführen können, brauchen wir eine Methode, um zu messen, ob wir das Richtige tun oder nicht, damit wir unser Verhalten entsprechend korrigieren können.
Der selbst balancierende mobile Roboter trifft auf einen völlig autonomen Freund. Quelle: aadhuniklabs auf hackster.io
Die dem PID-Mechanismus interne Rückkopplungsschleife hält unseren Bot aufrecht. Lehnt der sich etwas zu weit nach vorne? Bewegt er die Räder etwas nach vorne, um sich aufzurichten, und umgekehrt.
Um dies zu erreichen, demonstriert der Autor die Verwendung eines Raspberry Pi Pico-Boards, das im Dual-Core-Modus bei 250 MHz läuft. Den Roboter zum Ausbalancieren zu bringen, ist eine beeindruckende Leistung. Der Rest ist nur Angeberei:
Der selbst balancierende mobile Roboter trifft auf einen völlig autonomen Freund. Quelle: aadhuniklabs auf hackster.io
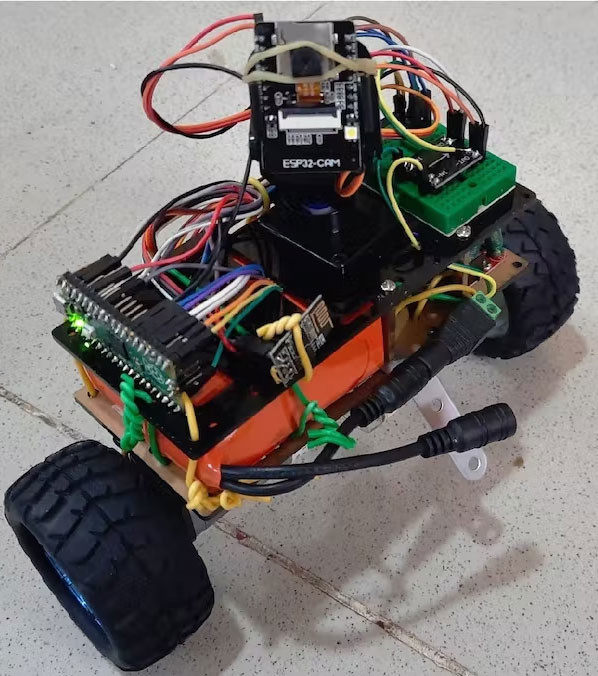
Ein ESP32-Kameramodul sendet über Wi-Fi (ESP8266) einen Live-Video-Feed an den Host-Controller (einen PC), und Sie können den Roboter steuern, um ihn zu bewegen (sodass er mehr als nur balanciert). Müssen Sie den Roboter genau in die Richtung richten, in die die Kamera schauen soll? Nein, das Bot-Design verfügt auch über einen Schwenk-Neige-Zoom-Controller für die Kamera, sodass Sie die Kamera sogar bewegen können, während der Roboter sich um seine eigenen Angelegenheiten kümmert, sein Balancieren.
Das Beste ist, dass die Dokumentation für all dies wirklich umfassend ist, sodass Sie alles in etwa drei Stunden zum Laufen bringen (zum Rollen?) können. Schauen Sie sich das detaillierte Projekt hier an.